File:Universal joint - output angle relative to input angle.png
Original file (804 × 556 pixels, file size: 11 KB, MIME type: image/png)
The revision #24057 of the page named "File:Universal joint - output angle relative to input angle.png" does not exist.
This is usually caused by following an outdated history link to a page that has been deleted. Details can be found in the deletion log.
| Description |
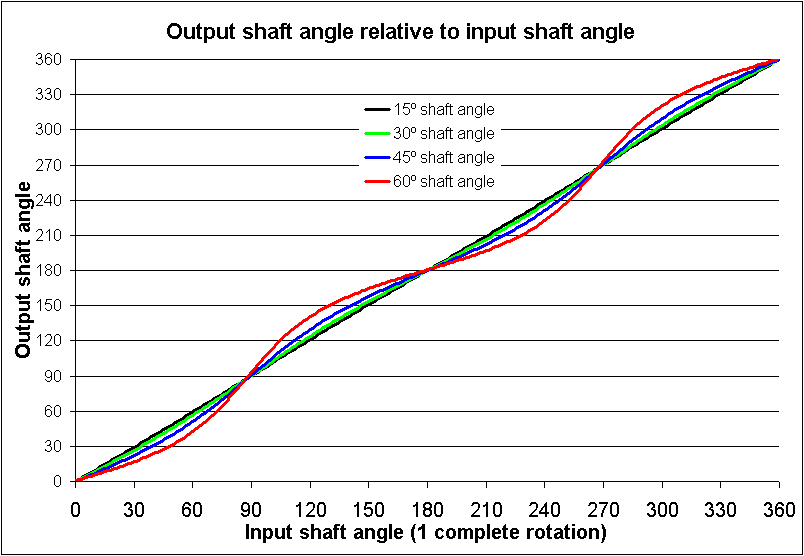
Equation used:Summation of ω2 for ω1 1 till 360 Where: |
||
| Date | 28 August 2006 (original upload date) | ||
| Source | Original uploader was Van helsing at en.wikipedia | ||
| Author | Van helsing | ||
| Permission (Reusing this file) |
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

|
This graph image could be re-created using vector graphics as an SVG file. This has several advantages; see Commons:Media for cleanup for more information. If an SVG form of this image is available, please upload it and afterwards replace this template with
{{vector version available|new image name}}.
It is recommended to name the SVG file “Universal joint - output angle relative to input angle.svg”—then the template Vector version available (or Vva) does not need the new image name parameter. |
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 03:22, 26 March 2007 | | 804 × 556 (11 KB) | Liftarn | {{Information |Description=== Equation used: == Summation of ω<sub>2</sub> for ω<sub>1</sub> 1 till 360 :<math>\omega_2 = \frac{\omega_1\cos\beta}{1-\sin^2\beta\sin^2\phi_1}</math> Where: <br> ω<sub>2</sub> is the speed of the output shaft <br> ω<sub> |
File usage
There are no pages that use this file.
{kind=link}